LOS ROBOTS DE EXPLORACION
La Exploración del Espacio ha demandado desde sus comienzos la utilización de vehículos, llamados sondas, que han sido en mayor o menor medida robotizados.
En la exploración de los planetas Venus y Marte participaron las sondas Mariner de la NASA y las sondas de la RFSA, denominada por lo general Roskosmos. Si bien el planeta Venus fue objeto de observación solamente por medio de vehículos orbitales, debido a su elevada temperatura en atmósfera y superficie; el planeta Marte además de ser observado, escaneado y cartografiado desde los vehículos orbitales, también ha sido explorado mediante el uso de rovers, que son vehículos robotizados de superficie.
A continuación se presenta una visión resumida de todos los robots autónomos que cumplieron sus objetivos con sobrado éxito en el planeta Marte.
VIKINGS
La sonda espacial Viking I es una de las dos sondas espaciales de exploración de Marte pertenecientes al programa Viking de la NASA, compuesta de una sonda orbital llamada Viking Orbiter I y una sonda de aterrizaje con un brazo robótico llamada Viking Lander I.
De forma equivalente la sonda espacial Viking II estaba dotada de los Viking Orbiter II y Viking Lander II.
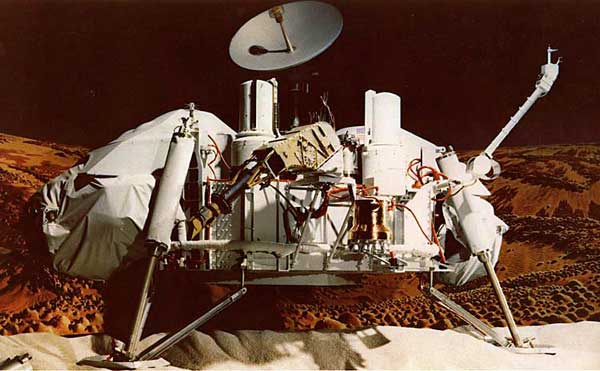 |
| VIKING LANDER |
El conjunto fue lanzado por un cohete Titan III-E/Centaur el 20 de agosto de 1975, con trayecto hacia Marte, tardando para la tarea unos 10 meses. Tras cinco días después de la inserción orbital, el orbitador comenzó a retransmitir las primeras imágenes. La Viking Orbiter I alcanzó la órbita marciana el 19 de junio de 1976. El aterrizaje de la Viking Lander I fue retrasado del 4 de julio de ese mismo año al 20 de julio, ya que las primeras fotografías del lugar de aterrizaje mostraron que no era totalmente seguro.
MARS PATHFINDER
La Mars Pathfinder fue la primera de una serie de misiones a Marte que incluyen rovers (vehículos robóticos de exploración). Esta misión a Marte fue la más importante desde que las Viking aterrizaran sobre el planeta rojo en 1976.
 |
| MARS PATHFINDER |
La Mars Pathfinder fue lanzada el 4 de diciembre de 1996 a bordo de un cohete Delta, un mes después del lanzamiento del Mars Global Surveyor y luego de 7 meses de viaje llegó a Marte el 4 de julio de 1997. El sitio de aterrizaje es Ares Vallis (Valle de Marte) en una región llamada Chryse Planitia (Planicies de Oro). Durante el viaje la nave realizó cuatro correcciones de vuelo: el 10 de enero, 3 de febrero, 6 de mayo y 25 de junio. El lander se abrió exponiendo al rover llamado Sojourner (en honor a la famosa abolicionista estadounidense Sojourner Truth) que realizaría diferentes experimentos en la superficie marciana.
 |
| SOJOURNER |
La misión Mars Pathfinder llevó un conjunto de instrumentos científicos para analizar la atmósfera marciana, el clima, geología y la composición de las rocas y el suelo. El proyecto fue el segundo del programa Discovery de la NASA, el cual promueve el envío de naves de bajo costo y de lanzamientos frecuentes bajo la premisa “más barato, más rápido y mejor” sostenida por su administrador Daniel Goldin. La misión fue dirigida por el Jet Propulsion Laboratory (JPL), una división del Instituto de Tecnología de California ("CalTech"), responsable del Programa de Exploración a Marte de la NASA.
PHOENIX
Phoenix o Phoenix Mars Lander es una sonda espacial construida por la NASA, lanzada el 4 de agosto de 2007 desde la base de Cabo Cañaveral con destino al planeta Marte. Su llegada se produjo a las 11:54 pm GMT del 25 de mayo de 2008 (MSD 47777 1:02 AMT, 25 Kumbha 212 Dariano) y la misión fue extendida hasta el 10 de noviembre del 2008.
El programa científico es un esfuerzo conjunto entre universidades de los Estados Unidos, Canadá, Suiza, Dinamarca y Alemania. Su objetivo primario fue llegar a una región cercana al Polo Norte marciano, desplegar su brazo robótico y hacer prospecciones a diferentes profundidades para examinar el subsuelo.
 |
| PHOENIX |
Phoenix no es el primer intento de esta naturaleza, pues ya en 1999 la sonda Mars Polar Lander llevaba el mismo destino, cuando se estrelló al realizar la maniobra de aterrizaje. Por otra parte, la misión Mars Surveyor Lander se suspendió antes de partir en 2001. Dos de los instrumentos diseñados para esta última se han renovado e incorporado a Phoenix. El nombre de Phoenix (Fénix, en español), se eligió para indicar de forma metafórica el renacimiento de estas dos misiones.
 |
| PHOENIX CON VISION ESTEREOSCOPICA |
A diferencia de los tres últimos descensos con éxito de sondas de la NASA en Marte (Mars Pathfinder, Spirit y Opportunity), que utilizaron bolsas de aire para amortiguar el impacto con el suelo, Phoenix vuelve al descenso con pequeños cohetes similares a los que llevaban hace tres décadas las dos sondas Viking para posarse en el suelo marciano tras el inicio del descenso con paracaídas.
SPIRIT
Spirit (designación oficial: MER-A, Mars Exploration Rover - A) es el primero de los dos robots que forma parte del Programa de Exploración de Marte de la NASA. La nave aterrizó con éxito en el planeta Marte a las 4:35 TUC del 4 de enero del 2004 (MSD 46216 3:35 AMT, 26 Tula 209 Dariano) y finalizó su actividad en marzo del 2010, momento en el que dejó de enviar comunicaciones. Su gemelo Opportunity aterrizó con éxito en Marte tres semanas después el 24 de enero del 2004.
 |
| SPIRIT |
Una tormenta de polvo azotó el hemisferio opuesto al del aterrizaje del Spirit, lo que produjo un calentamiento de la atmósfera, ya que el polvo en suspensión atrapa calor; también causó un estrechamiento de la atmósfera por lo que los responsables de la misión ordenaron al módulo de descenso que abriera los paracaídas 2 segundos antes para compensarlo.
En el lugar de aterrizaje del Spirit la atmósfera tenía más polvo en suspensión del previsto y las temperaturas diurnas, aunque bajas, eran 10 °C sobre las previstas. Estos robots llevan unas baterías de plutonio para calentarlos y así poder sobrevivir a las frías noches marcianas de hasta -105 °C; pero el funcionamiento de las baterías causó un calentamiento de 5 °C, lo que obligó a apagar al Spirit hacia el mediodía marciano, esta circunstancia, unida a una rampa ‘airbag’ mal plegada, retrasó hasta el 16 de enero del 2004 el instante en que el Spirit pisó el suelo marciano.
OPPORTUNITY
MER-B (Opportunity) es un robot rover activo en el planeta Marte desde 2004, es el segundo de los dos vehículos robóticos de la NASA que aterrizaron con éxito en el planeta Marte en 2004. El vehículo aterrizó el 25 de enero de 2004 a las 05:05 TUC, MSD 46236 14:35 AMT, 18 Scorpius 209 Dariano). Su gemelo, MER-A (Spirit), había aterrizado en Marte tres semanas antes, el 3 de enero de 2004. Ambos robots forman parte del 'Programa de Exploración de Marte' de la NASA.
 |
| OPPORTUNITY |
Durante el Sol 23 (el 16 de febrero de 2004), Opportunity abrió con éxito zanjas en la tierra en Hematite Slope y empezó a investigar los detalles del subsuelo. El robot apartó la tierra alternadamente hacia adelante y hacia atrás fuera de la zanja con su rueda delantera mientras las otras ruedas mantenían al robot en su sitio. El robot giró un poco alternativamente a derecha e izquierda para ensanchar el agujero. El proceso duró 22 minutos. La zanja resultante tiene aproximadamente 5 dm × 1 dm de profundidad. Dos rasgos que llamaron la atención de los científicos son la textura grumosa de la tierra en la pared superior de la zanja y el brillo del suelo en la parte honda de la zanja.
Inspeccionando los lados y el suelo de la zanja, notaron que las esférulas son más brillantes y el polvo está formado por un grano tan fino que el microscopio del robot no puede detallar las partículas individuales que lo componen, indicando que lo que hay debajo es diferente a lo que está en la superficie.
CURIOSITY
La Mars Science Laboratory (abreviada MSL), conocida como Curiosity, del inglés 'curiosidad', es una misión espacial que incluye un astromóvil de exploración marciana dirigida por la NASA. Programada en un principio para ser lanzada el 8 de octubre de 2009 y efectuar un descenso de precisión sobre la superficie del planeta en 2010 entre los meses de julio y septiembre , fue finalmente lanzado el 26 de noviembre de 2011 a las 10:02 am EST, y aterrizó en Marte exitosamente en el cráter Gale el 6 de agosto de 2012, aproximadamente a las 05:31 UTC enviando sus primeras imágenes a la Tierra.
 |
| CURIOSITY |
La misión se centra en situar sobre la superficie marciana un vehículo explorador (tipo rover). Este vehículo es tres veces más pesado y dos veces más grande que los vehículos utilizados en la misión Mars Exploration Rover, que aterrizaron en el año 2004. Este vehículo lleva instrumentos científicos más avanzados que los de las otras misiones anteriores dirigidas a Marte, algunos de ellos proporcionados por la comunidad internacional. El vehículo lanzó mediante un cohete Atlas V 541. Una vez en el planeta, el rover tomó fotos para mostrar que amartizó con éxito. En el transcurso de su misión tomará docenas de muestras de suelo y polvo rocoso marciano para su análisis. La duración prevista de la misión es de 1 año marciano (1,88 años terrestres). Con un radio de exploración mayor a los de los vehículos enviados anteriormente, investigará la capacidad pasada y presente de Marte para alojar vida.
 |
| CURIOSITY CON EL MODULO CHEM CAM |
El MSL tiene cuatro objetivos: Determinar si existió vida alguna vez en Marte, caracterizar el clima de Marte, determinar su geología y prepararse para la exploración humana de Marte. Para contribuir a estos cuatro objetivos científicos y conocer el objetivo principal (establecer la habitabilidad de Marte) el MSL tiene ocho cometidos:
Evaluación de los procesos biológicos:
1.º Determinar la naturaleza y clasificación de los componentes orgánicos del carbono.
2.º Hacer un inventario de los principales componentes que permiten la vida: carbono, hidrógeno, nitrógeno, oxígeno, fósforo y azufre.
3.º Identificar las características que representan los efectos de los procesos biológicos.
Objetivos geológicos y geoquímicos:
4.º Investigar la composición química, isotópica y mineral de la superficie marciana.
5.º Interpretar el proceso de formación y erosión de las rocas y del suelo.
Evaluación de los procesos planetarios:
6.º Evaluar la escala de tiempo de los procesos de evolución atmosféricos.
7.º Determinar el estado presente, los ciclos y distribución del agua y del dióxido de carbono.
Evaluación de la radiación en superficie:
8.º Caracterizar el espectro de radiación de la superficie, incluyendo radiación cósmica, erupciones solares y neutrones secundarios.